Robot Packaging Line: Table of Contents
A robot packaging line should be planned around product flow, operator access, safety, testing and future expansion. Adding a robot to a packaging production line is not only a machine purchase. It is a process design decision. The robot must match the product, packaging format, line speed, available space, safety layout, and the way operators already manage daily production.
For this reason, the most reliable approach is to plan the project in stages. A clear sequence helps the factory choose the right application, prepare the surrounding equipment, test the workflow, and make sure the team can operate the system with confidence.
Where robots usually fit in packaging lines
Robots are often added near repetitive handling points, such as carton loading, product transfer, tray handling, palletizing, or end-of-line sorting. These tasks are easier to define because the pickup point, placement point, product weight, and cycle time can be measured before the project begins.
What a good starting project should have
A suitable first project should have a stable product flow, a clear task sequence, enough installation space, and measurable output. If the line already uses conveyors, carton sealers, wrapping machines, or filling systems, the robot should be planned as part of that complete workflow.
A practical note before starting
The best robot project is usually not the most complex one. It is the one where the task is clear, the result can be measured, and the system can be improved after the first stage is running.
Step 1: Review the Packaging Workflow
The first step is to observe the current packaging line in detail. Review how products enter the line, where they are packed, how cartons or trays are handled, and where finished goods move after packing. This review shows which task is ready for robot support and which surrounding process may need adjustment.
Map the product journey
Start with the product path from upstream production to final packaging. Note the product size, orientation, weight, packaging material, and handling method at each point. If several product types run on the same line, record the common formats and the formats that need changeover.
Measure the real operating rhythm
Cycle time should be measured from actual production, not only from a machine specification. Include product arrival time, operator actions, machine waiting time, carton movement, and transfer to the next station. This data will guide robot speed, payload, reach, and gripper selection.
Step 2: Choose the Right Robot Application
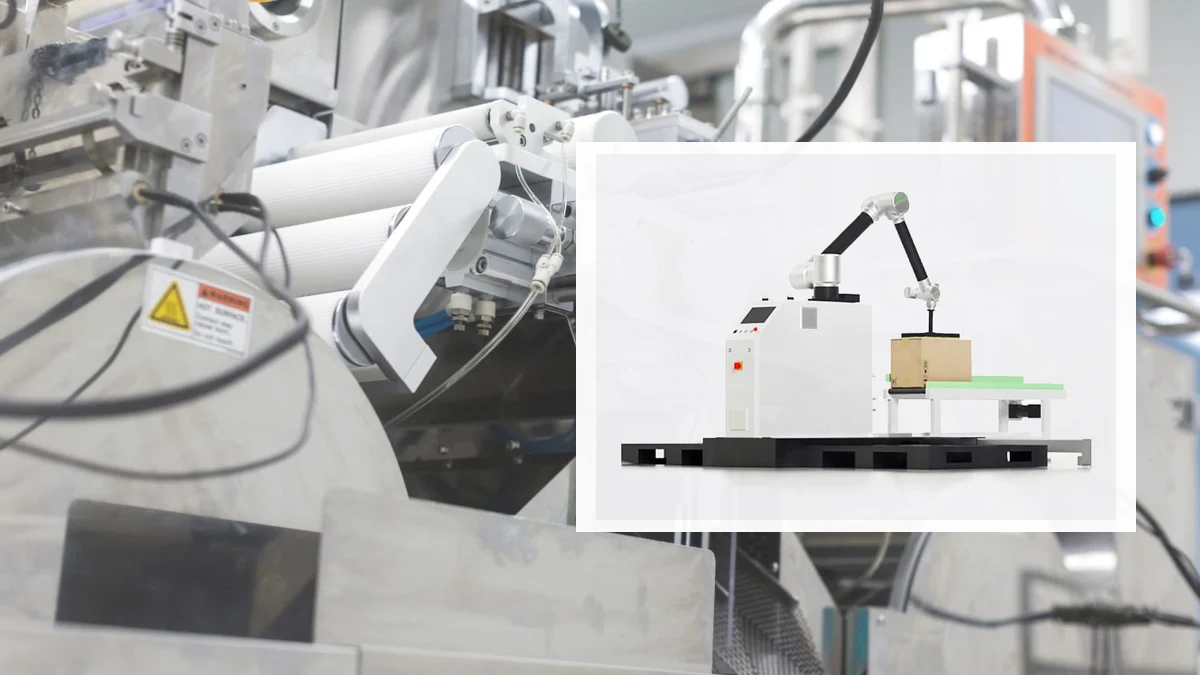
After the workflow is understood, choose the application that will deliver the clearest operational value. In packaging lines, common applications include pick-and-place, carton handling, case loading, palletizing, and machine tending around packaging equipment.
Match the robot to the task
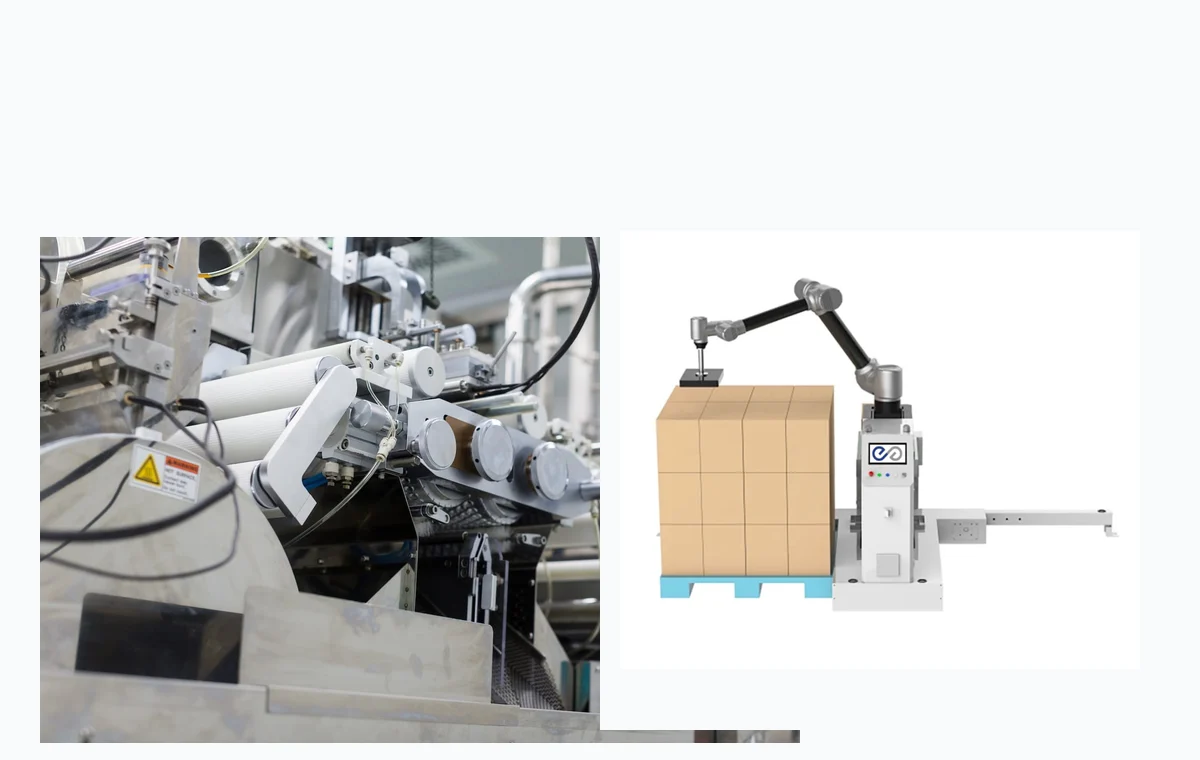
A robot used for carton stacking may need different reach, payload, and gripper design from a robot used for small product transfer. If the line involves carton handling or end-of-line stacking, cobot palletizing can be a practical starting point because the movement pattern is easy to define.
Robot selection factors
- Payload including product and gripper weight
- Reach between the pickup point and placement point
- Cycle time required by the packaging line
- Available floor space and safety arrangement
Step 3: Plan Integration with Packaging Machinery
The robot must work with the machines around it. This can include conveyors, sensors, carton erectors, sealers, filling machines, wrapping machines, coding systems, and pallet handling equipment. Planning these connections early helps the whole line work as one system.
Connect the robot to the line layout
Robot placement should allow smooth pickup and placement without blocking operators, material flow, or maintenance access. When the line includes packaging machinery, the project should review both mechanical layout and signal communication between each machine.
Review machine-to-machine communication
Signals from sensors, conveyors, and packaging machines help the robot know when to pick, wait, place, or stop. For a line that combines several machines, an integrated system plan helps define how each machine exchanges signals and supports the production sequence.
Examples of machines that may connect with a robot
A robot can be planned around a carton sealer machine for end-of-line carton handling, or near a horizontal flow pack machine when product transfer or secondary packing is part of the workflow.
Step 4: Test the System Before Full Operation
Testing confirms that the robot, gripper, conveyor, sensors, and packaging machines can run together under real conditions. It is useful to test with normal products, slower trial speeds, expected changeovers, and the packaging materials used in daily operation.
Test product handling first
Before focusing on speed, confirm that the robot can hold the product securely, place it accurately, and release it without affecting the package. This is especially important for cartons, flexible packs, trays, and products with different surface conditions.
Check line behavior during stops and restarts
A packaging line does not run in perfect conditions all day. Testing should include planned pauses, empty product gaps, carton changes, sensor delays, and restart sequences. These details help the system behave predictably during regular production.
Step 5: Train the Team and Improve Continuously
Once the robot system is ready, operators and maintenance staff should understand how the system starts, stops, resets, and responds to normal production situations. Clear operating procedures help the robot become part of the daily packaging workflow.
Build operating knowledge into the line
Training should cover product changeover, basic troubleshooting, safety checks, cleaning access, and routine inspection. The team should also know which conditions require an operator response and which conditions can be handled by the machine sequence.
Use production data for improvement
After installation, review cycle time, completed packs, downtime causes, product changeover time, and operator feedback. These observations can support future improvements, such as adjusting the gripper, changing the robot path, or expanding automation to another point in the packaging line.
Plan Your Robot Packaging Line with Newgate Machine
If your factory is planning to add a robot to a packaging line, Newgate Machine can help review the product flow, machine layout, robot application, and integration requirements before selecting the right equipment configuration.
Summary
Introducing robots into a packaging production line should be planned in a clear sequence: review the workflow, choose the right robot application, prepare machine integration, test the system, and train the team for daily operation. With a structured plan, the robot becomes part of the full packaging process rather than a separate piece of equipment.


